ABB机器人零点校准详细解读
一、本节要点
★ 了解需校准情况
★ 熟悉零点校准原理
★ 熟练掌握零点校准方法
二、需校准情况
在以下几种情况下,ABB机器人需要校准机械零点:
(1)新购买机器人时,厂家未进行机器人零点校准。
(2)电池电量不足,更换电池。
(3)更换机器人本体或控制器。
(4)转数计数器数据丢失。
三、校准原理
IRB 120 机器人本体的6个轴均有零点标记,如下图所示。手动将机器人各轴零点标记对准,记录当前转数计数器数据,控制器内部将自动计算出该轴的零点位置,并以此作为各轴的基准进行控制。

四、校准步骤
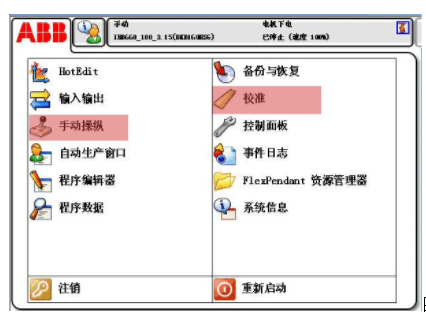
第一步:选择手动操作模式
第二步:选择动作模式 (参看 图2 和 图3)
方法:
1> 点击 动作模式
2> 点击 轴1 - 3 或者 轴4 - 6
3> 点击 确定
第三步:选择工具坐标
方法:
1> 点击 工具坐标
2> 点击 tGripper
3> 点击 确定

第四步:选择移动速度
方法:
1> 点击 增量
2> 点击 中 或者 小
3> 点击 确定

第五步:手动移动机器人各轴到机械零点位置 (参看 图2)
方法:
此时图2上 操纵杆方向 处显示操纵杆移动方向于轴的对应关系3
注意:
如果先前选择 轴1 - 3 则
1> 操纵杆上下移动为2轴动作
2>操纵杆左右移动为1轴动作
3> 操纵杆顺/逆时针旋转为3轴动作
如果先前选择 轴4 - 6 则
1> 操纵杆上下移动为5轴动作
2>操纵杆左右移动为4轴动作
3>操纵杆顺/逆时针旋转为6轴动作
Ps:
1> 左手持示教器,四指握住示教器使能开关(在示教器下方黑色胶皮里面)
2>右手向唯一一个方向轻轻移动操纵杆,把各轴按顺序移动到各自机械绝对零点
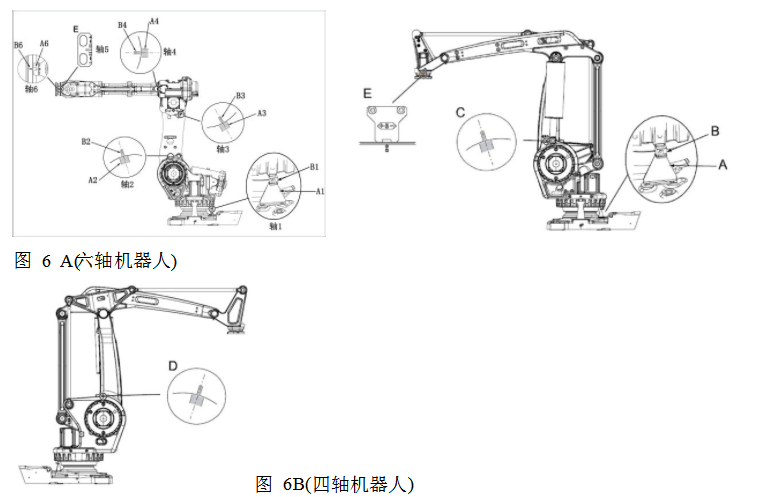
移动顺序,依次为6轴→5轴→4轴→3轴→2轴→1轴,否则会使4,5,6轴升高以致于看不到零点位置。
机械零点位置如图6所示,当所有六个轴全部对准机械零点位置以后,机器人的姿态正如图6所示。
第六步:更新转数计数器
方法:
1> 点击ABB
2>点击校准
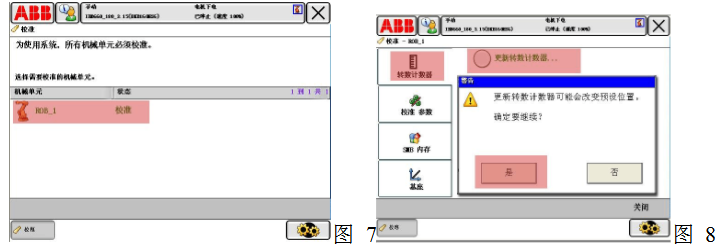
3>点击ROB_1 如图7
4>点击转数计数器
5>点击更新转数计数器(会弹出一个警告界面)如图8
6>点击是
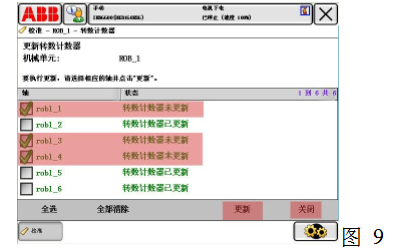
7>点选 显示转数计数器未更新所有轴,显示转数计数器已更新的轴不用选择
8>点击更新(会弹出一个警告界面) 如图9
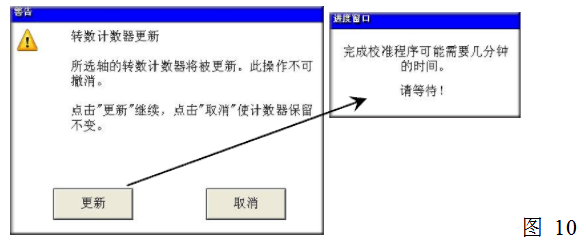
9>点击更新(会弹出一个进度窗口 然后等待)如图10
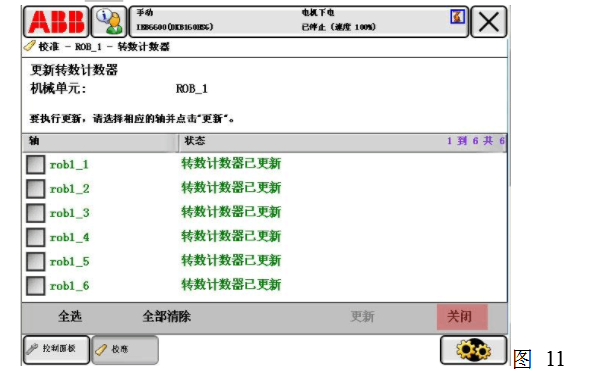
ps:最后显示更新以后的状态
10>点击关闭
第七步:重新启动机器人
方法
1>点击ABB
2>点击 重新启动
3>点击热启
来源:广科智能 转载注明出处
相关产品